approaches
dynamic mechanical testing
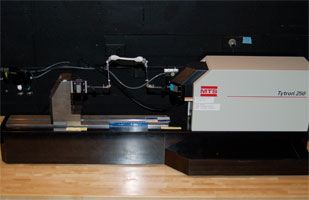
Using our MTS Tytron 250, we measure the time-dependent viscoelastic properties of biological structures and materials. These mechanical properties govern how biological structures function as part of a complex 3D stress field during behaviors such as locomotion.
kinematic analysis

Using high-speed and high-definition video, we capture and analyze the motion of swimming vertebrates. We have developed algorithms that allow us to mathematically decompose the complex body motions of undulatory swimming.
force-coupled computer modeling
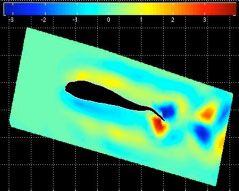
We combine mechanical and kinematic information to build closed-loop simulations of swimming fish and robots. With input from a nervous system, muscles generate force, transmitted via a skeleton, in response to the external fluid forces on the body.
biomimetic design and engineering

Using biochemical methods and mechanical engineering, we create artificial axial skeletons that match the morphology and mechanical behavior of the axial skeletons from sharks and fish. We use these biomimetic structures to build biomimetic robots and to understand the mechanical design of the targeted biological system.
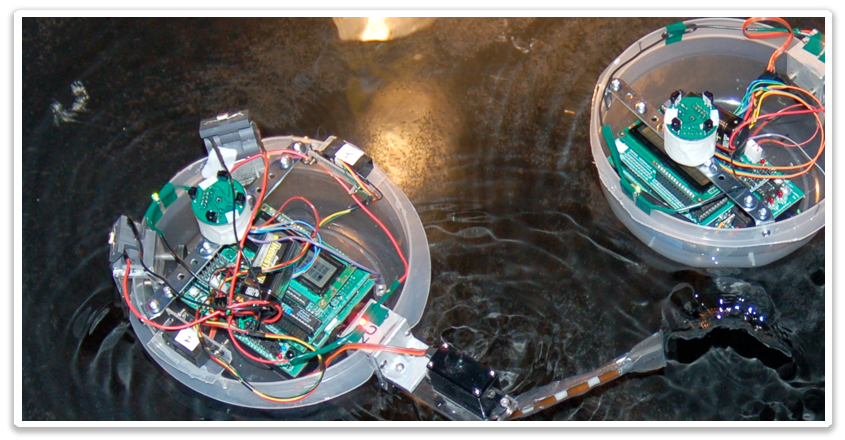
biomimetic robotics

Combining cognitive science, neuroscience, biology, and engineering, we build autonomous robots to test hypotheses about how animals, both living and extinct, function mechanical and behave ecologically. These biomimetic robots can also be used to explore and monitor oceans, lakes, and rivers.
evolutionary robotics
Combining cognitive science and evolutionary biology, we create populations of autonomous biomimetic robots that compete with each other in a simplified environment and are selected, based on their relative performance, to contribute genes to the next generation of robots. This approach allows us to test evolutionary hypotheses about how specific selection environments may have driven the evolution of vertebrate characters such as vertebrae, lateral lines, and caudal fins.
Please see the intersections page for information on our collaborators, our research partners who help make these approaches work.