|
|
|||||
|
|
|
|
|
|
|
|
|
|
Biomimetic Evolutionary Analysis: The Origin of Vertebrae via Computational and Robotic Simulations of Fish Principal Investigator: John Long, Department of Biology, Vassar College. co-Principal Investigators: Thomas Koob, Skeletal Biology, Shriners Hospital for Children, Tampa. Chun Wai Liew, Department of Computer Science, Lafayette College. Robert Root, Department of Mathematics, Lafayette College. This research project is funded by the National Science Foundation (award DBI-0442269 from the CRUI program). Summary (general audience) <> Abstract (scientific audience) Keywords: evolution, vertebrates, vertebral column, axial skeleton,
vertebral centra, notochord, fish, biomimetics, animat, robot, simulation,
genetic algorithm, evolutionary robotics, evolutionary computing, artificial
life. |
||||||||||||
|
|
Three biomimetic robots compete in a navigational light-seeking task (photo above). Each robot is modeled after a free-swimming larva of a sea squirt, using a single eye spot to detect and navigate up a light gradient (Long et al. 2004; pdf). Each propulsive tail, obscured in this picture below the surface waves, has a biomimetic vertebral column created using gelatin hydrogels (Koob & Hernandez, 2003). Each vertebral column has a different phenotype (number of vertebrae, length); individual robots are assigned a relative fitness based on performance in the task and allowed to reproduce variable offspring in proportion to their fitness. Successive generations thus evolve new vertebral morphologies in response to selection for enhanced performance (Schumacher et al. 2004). In spite of their name, the first vertebrates evolved without vertebrae, which are the bones in the backs of most living species. Vertebrae have evolved independently at least five different times, in five different groups of ancient fishes, from a non-bony skeleton. Biologists have sought for years to understand these critical events in vertebrate evolution. Because the vertebral column plays an important mechanical role in the body flexures that living fish use to swim, we sought to test the idea that vertebrae evolved in response to natural selection for enhanced swimming performance and navigation. The trouble with reconstructing the evolution of vertebrae is that since events occurred nearly 400 million years ago we are unable to directly observe and test natural selection in action. To understand how selection may have operated, we build, swim, compete, and reproduce artificial fish. |
|||||||||||||
|
|
|
|||||||||||||
|
|
|
|||||||||||||



|
|
|
|
|
|
Research training: A
two-year apprenticeship-mentorship.
Chun Wai Liew (right) works with
Mayank Lahiri on next-generation genetic algorithms that will allow us to
evolve the vertebral columns of complex digital fish. Peak-adapted phenotypes will be
tranferred, in a process analogous to immigration in natural populations,
between the digital and robotic systems. |
|
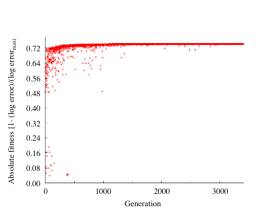
Evolutionary run of digital fish. Absolute fitness is scored by comparing the motion of the digital fish mimic to that of its real fish model, a pumpkinseed sunfish (Lepomis gibbosus). Fitness asymptotes after about 1000 generations. |
|
|
|
|
|
|
|
|
|
||
|
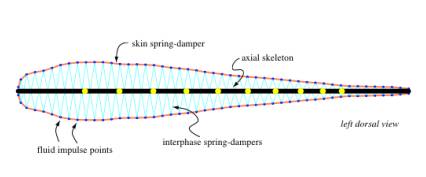
Biomimetic digital fish. Modeled after a 12 cm long sunfish, this digital fish includes two mathematic sub-models: (1) a solids model that governs the internal muscle and skeletal forces and (2) a fluids model that governs the external forces on the skin. We combine the two in a coupled, closed-loop system that outputs swimming kinematics in response to a preset muscle activity pattern (Root et al. 2004). |
|
||

|
Comments on this page: jolong@vassar.edu || Technical
questions: webmanager@vassar.edu
Contact information for John
Long: Department of Biology, Box 513, Vassar
College,124 Raymond Avenue, Poughkeepsie, New York 12604-0513 |